国家“八六三”计划智能机器人主题产业化基地(河南分中心)
国家“八六三”计划智能机器人主题产业化基地(河南分中心)
一、平台简介
河南科技学院与北京机械工业自动化研究所有限公司于2020年10月签署“战略合作框架协议”,正式建立国家“八六三”计划智能机器人主题产业化基地(河南分中心)。该中心是科技部批准下建立的国家级产业化平台省级分中心,分中心拥有相对独立的组织机构和运行管理机制,主要进行智能机器人核心关键技术攻关,开展高性能功能化智能机器人的前瞻性研究和产业化应用研究。
二、平台成员
在研人员65人,核心成员23人。其中,博士6人,硕士17人。技术力量雄厚,团队成员的年龄结构、职称结构和从事的研究方向组成均很合理,知识结构能实现很好的互补,充分体现产学研联合攻关的运行模式,实现“零距离”的技术成果转化,充分发挥全社会共同推进的运行机制。
三、研究方向
1. 畜禽类肉品自主加工作业机器人系统
2. 变构型救援机器人通信链路重构及生命体探测
3. 智能排爆机器人多阶自主导航与协同控制
4. 水陆两栖机器人路径规划与作业模式自适应切换技术
5. 智能消防机器人火情自主感知与扑灭
6. 面向储大型壁面检测、清理和维护的爬壁机器人研发
四、研究成果
中心成立以来,主持科技部国家重点研发计划、军委科技委H863计划、中央支持地方高校专项、河南省重点研发专项、郑洛新国家创新示范区科技攻关等国家级、省部级重点项目6项,其他省部级、横向项目20余项;自主研发20余款机器人产品。授权发明专利20余项,发表SCI/EI检索论文40余篇;获得河南省科技进步三等奖1项,军队科技进步三等奖2项,空军技术革新奖2项,中国创新创业大赛河南赛区优秀团队奖1项。具体成果如下:
1.畜禽类肉品高效精准自主分割机器人技术(国家重点研发计划智能机器人重点专项)
团队瞄准畜禽肉品分割“效率低、损耗多、易污染、无溯源”等行业共性难题,聚焦畜禽类肉品自主分割需求,系统化研制出由10余台套专用机器人及关键装备构成的畜禽类肉品机器人自主分割作业系统。突破了畜禽胴体精准感知、自主切块、精准剔骨等关键核心技术;研制了畜禽胴体三维感知系统、自主切块机器人工作站、自主剔骨机器人工作站等自主作业系统,制定了畜禽类肉品机器人自主分割作业体系行业标准,依并托河南众品、江苏苏食完成四条生产线应用验证(图1-2)。

图1 畜禽类胴体自主切块机器人工作站
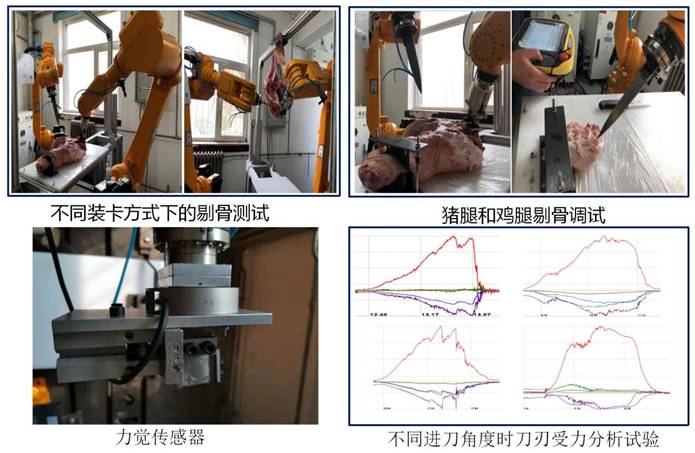
图2 畜禽类胴体快速自主剔骨机器人工作站
2.肉品智能化加工关键技术与装备研发及应用(河南省重大科技专项)
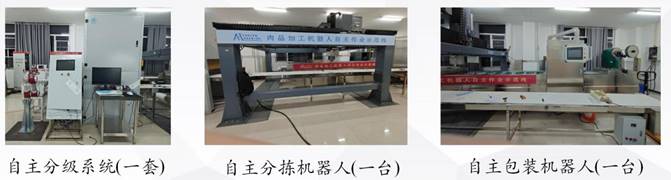
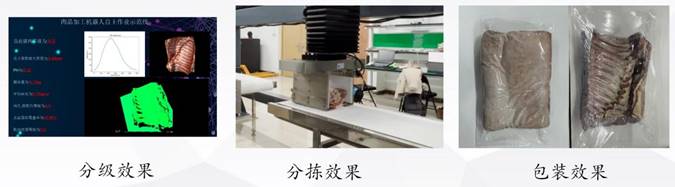
团队围绕肉品加工分级、分拣、包装、冷链运输等方面面临的共性问题、痛点难点,重点突破了冷却分割肉自主化分级、分拣和包装环节关键技术,开发了冷却分割肉自主分级、分拣与包装机器人系统,解决了我国冷却分割肉自主分级与包装方面长期存在的“效率低、易污染、无溯源”等行业共性难题(图3)。
|
|
图3 新产品研发-研制自主分级系统、自主分拣机器人和自主包装机器人各 1 台(套) |
3.非光滑方程组的有效算法及在智能电网实时定价中的应用研究(国家自然科学基金项目)
非光滑方程组是一重要的非光滑优化问题,由于其能为数学中的许多问题提供统一的理论框架,关于其理论和算法的研究一直备受关注。然而,由于相关函数不可微,且Lipschitz函数的广义微分一般不易算出,如何快速、有效的得到对应非光滑函数广义微分其中一个元素,成为非光滑方程组非光滑算法研究的难点之一。基于此,项目针对Lipschitz函数一些子类的广义微分计算方法进行研究,并以此为基础,提出求解非光滑方程组的两步及多步Levenberg-Marqurdt类算法(图4);提出求解大规模非光滑方程组的光滑化共轭梯度算法;探究应用于智能电网实时定价问题的非光滑方程组有效算法。项目的研究结果不仅对加强和促进非光滑优化理论与算法方面的研究,而且对促进国民经济的建设和发展具有重要的科学意义。
图4两步光滑化Levenberg-Marqurdt算法对比试验
4.特种机器人自主探测与识别系统开发及应用(河南省科技进步三等奖)
针对不可视目标“探不到、定不准”及非合作目标“看不清、辨不出”等“人工有余、智能不足”的技术难题,提出了面向不可视目标的自主探测与识别方法和基于多视角信息融合的非合作目标探测与识别方法,突破了面向特定任务的系统集成与优化等关键技术,研制了特种机器人自主探测与识别系统,项目成果在反恐、安防、救援、农业等领域进行了应用示范和产业化(图5)。
图5科技创新点逻辑关系示意图
5.大豆玉米带状复合种植模式下的自动收割系统关键技术研发及示范(河南省重点研发专项)
研发团队围绕我国对农业机器人的重大需求,以大豆玉米套种模式为研究背景,以智能性、实用性的大豆玉米联合收割系统为研究对象,瞄准大田环境信息感知、自主探测、自适应控制和多源异构信息融合带来的挑战性难题,开展大豆玉米套种模式下自动化收割系统关键性技术研发及示范性研究,满足社会和市场发展需求。本项目旨在突破制约农业机器人智能化水平的核心瓶颈技术问题,从采摘大豆玉米的应用需求入手,深度融合视觉、力觉等感知信息,同时关注生物体的尺度伸缩、空间集聚、动态调整等运动可重构性,构建更加符合生物感知与运动特性的大豆玉米联合收割机器人软硬件系统,为我国机器人产业智能化发展提供创新思路和实用化解决方案(图6)。
图6大豆玉米带状复合种植模式下的自动收割系统总体研发方案
(图片/柴豪杰 初审/柴豪杰 复审/徐涛 终审/蔡磊)
【关闭】
邮编:453003 | 电话:0373-3040507
地址:河南科技学院东校区弘德楼 | 版权所有:河南科技学院人工智能学院 | 技术支持:河南科技学院智能机器人团队