河南省智能农业机器人技术工程研究中心
一、平台简介
河南省智能农业机器人技术工程研究中心2020年8月经河南省发改委批准建设,开展创新性基础研究和应用基础研究,重点攻克农业机器人协同控制、多机器人通信链路智能重构与硬件可变构型、作物生命信息快速感知技术与传感仪器研制、植物表型信息高通量快速获取、大田复杂场景的智能信息感知、畜禽类肉品自主化精细剔骨等核心难题。在纳入新序列管理的省级工程中心评价中连续两次获评“优秀”等次,并被学校纳入“十四五”国家级科研平台重点规划。
二、平台成员
中心主要固定在编研究人员46人,其中教授13人,博士25人;硕士生导师31人。国家食品与药品监督管理局审评专家3人,教育部教学指导委员会委员1人,河南省杰出人才创新基金和河南省高校创新人才工程资助者4人,河南省政府特殊津贴专家1人,河南省教育厅学术技术带头1人。技术力量雄厚,团队成员的年龄结构、职称结构和从事的研究方向组成均很合理,知识结构能实现很好的互补,充分体现产学研联合攻关的运行模式,实现“零距离”的技术成果转化,充分发挥全社会共同推进的运行机制。
三、研究方向
1.农业智能无人装备共性技术研究
2.农业智能无人样机研制
3.农业智能无人装备应用
四、研究成果
中心运行至今,在智能农业机器人关键技术攻关、创新产品研发、成果转化及军民融合等方面取得了一系列代表性成果,具体包括:自主研发出国内首台(套)人机交互咽拭子自助采样系统;获河南省科技进步二等奖、三等奖各1项;授权国家发明专利34项,发表高水平论文60余篇;承担各类国家和省部级项目近30项,获得关键技术攻关成果26项,主持或参加制定的国家或行业标准7项、研制包括农业机器人在内的机器人样机40余款等。具体成果如下:
1.原创性智能机器人自主作业科研中试线
中心立足农业、服务国防、面向国家重大需求和经济主战场,致力于解决具体工况下智能无人系统的感知、自主、交互及集成等关键技术难题,组建了“理论研究、技术开发、样机研制”于一体的智能机器人科研中试线。自主研发40余款各类型原创性智能机器人产品,主要包括国内首台(套)咽拭子采样自助设备、构型可变AUV、水陆两栖自主巡视(作战)机器人、立体空间攀爬探测机器人、自主割胶机器人、自主安防巡视机器人等,相关研究工作得到科技部专家、省市级领导的充分肯定(图1)。

图1 研发的部分原创性智能机器人产品
2.肉品加工机器人自主作业科研中试线(国家重点研发计划课题、河南省重大科技专项课题)
针对现有分割效率低的问题,研制可变构型畜禽类胴体快速切块机器人,研究云计算、深度强化学习、大数据技术;研究多执行器群体协同分布式决策优化方法;研究畜禽胴体最优切割路径自主规划方法,构建自主协同作业行为规划策略体系。突破了应用于猪类胴体分割机器人的切割路径自主规划、力反馈下的分割路径自主修正以及三维胴体动态切割路径构建技术。
针对冷却分割肉分级、分拣与包装环节存在手段落后、自主化程度低、损耗高等问题,聚焦肉品加工的共性问题、痛点难点,开展科技攻关。突破冷却分割肉自主化分级、分拣和包装环节关键技术,开发冷却分割肉自主分级、分拣与包装机器人系统,解决我国冷却分割肉自主分级与包装方面长期存在的“效率低、易污染、无溯源”等行业共性难题,目前已研发10台套专用机器人及关键装备构成的畜禽类肉品机器人自主分割作业系统,搭建肉品加工机器人自主作业科研中试线(图2)。

图2肉品加工机器人自主作业科研中试线
3.人机交互咽拭子自助采样关键技术及应用(河南省科技进步二等奖)
针对咽拭子采样“他采差异、机采伤害、自采困难”等难题,科研团队以“有效、经济、安全、便捷”为目标,以“位置识别-深度预测-动态配准”为研究思路,依托多项国家自然科学基金研发了人机交互咽拭子采样系统,特别是在河南省委“13710”重大督办专项的直接推动下,历经近十年协同攻关,首创了人机交互的咽拭子自助采样模式,突破了咽拭子采样位置精准识别、采样目标动态追踪与深度配准等关键技术,取得了系列创新性成果,填补了二维成像状态下咽拭子与采样位置深度配准的空白。在新冠疫情防控最艰难时期,为及时发现疫情、及时控制疫情做出了了巨大贡献,得到河南省委、新乡市委主要领导的高度肯定,并被人民日报、新华社、央广网等央媒持续宣传报道,被中国工程院王家耀院士为组长的评价委员会一致认为“该项目成果研究思路新颖、技术先进、实用性强,整体达到国际先进水平,在咽拭子采样有效性判别方面达到国际领先水平”。
|
|


图3 国内首台(套)核酸检测自助采样设备(已经产业化)
4.承担JW科技委国防科技创新特区H863计划水下***平台
针对军队向信息化、无人化、智能化发展的需求,团队依托在特种机器人领域积累的复杂环境下的机器人定位与自主导航技术、复杂干扰环境下的环境感知、非结构环境下的机器人运动结构设计等方面积累的先进经验和技术,开展军用方面的机器人系统设计,并承担JW科技委国防科技创新特区H863计划1项。自主研发的“水下子母机器人跨域协同探测平台”,被军委装备发展部“慧眼行动”定位为具有技术引领作用的创新成果,并受邀参展。本次共展出重大装备17台套,我校研制的装备位列第6位。该项成果受到了莅临现场指导的JW装备发展部、HJ装备部等军方高层首长高度肯定,评价我校研制的装备具有“瞄准未来作战”的重大装备属性。
5.特种机器人自主探测与识别系统开发及应用(河南省科技进步三等奖)
在特种机器人探测与识别领域,存在对不可视目标“探不到、定不准”及非合作目标“看不清、辨不出”等“人工有余、智能不足”的技术难题。基于此,提出了面向不可视目标的自主探测与识别方法;构建了面向非合作目标的多视角光场数据库,提出了基于多视角信息融合的非合作目标探测与识别方法;突破了面向特定任务的系统集成与优化等关键技术,研制了特种机器人自主探测与识别系统。项目成果在反恐、安防、救援、农业等领域进行了应用示范和产业化,提高了特种机器人在复杂动态环境下的高精度自主探测与识别作业能力。相关成果如图4所示。
图4科技创新点逻辑关系示意图
6.水下坝体智能巡检机器人关键技术研究及应用(河南省重点研发专项)
本项目旨在围绕我国水下坝体的安全监测与健康诊断的重大需求,以水下坝体缺陷检测需求为研究背景,以智能化、高效性的水下坝体智能巡检机器人为研究对象,瞄准水库坝体水下部分机器人水下作业结构、稳定控制、通信定位和智能感知等方面的带来的挑战性难题,开展水下坝体智能巡检机器人关键技术研究及应用,满足社会和市场发展需求。以研究成果产业化为最终目标,探索从技术研发到产品量产的创新思路,丢弃空中楼阁式的研究策略,瞄准行业需求,以开放的视角重点研发并应用新技术和新设备,紧密与水下坝体监测相结合,切实减少科研人员的工作强度,推进水下坝体监测向智能化、标准化发展。通过研究,突破制约水下坝体检测机器人作业高效化、智能化的核心技术瓶颈,从模拟人工潜水检测作业的方式入手,深度融合机器视觉、远程通信、运动控制等不同领域技术手段,同时关注水下坝体的检测的空间范围、水下机器人检测作业的时效性,构建更加符合生物感知与运动特性的水下坝体智能巡检机器人关键技术体系,为我国机器人产业智能化发展提供创新思路和实用化解决方案。
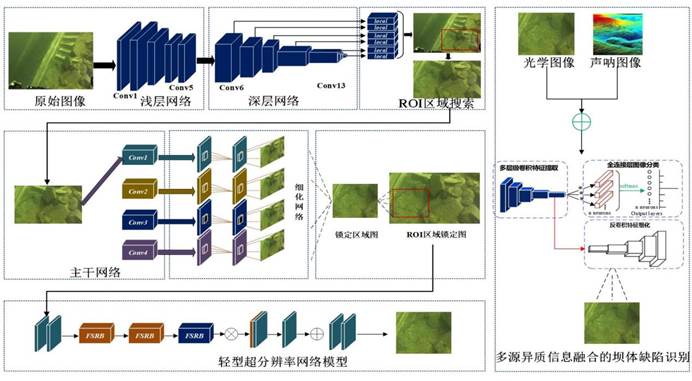
图5面向水下坝体缺陷检测的智能识别技术
7.大豆玉米带状复合种植模式下的自动收割系统关键技术研发及示范(河南省重点研发专项)
团队围绕我国对农业机器人的重大需求,以大豆玉米套种模式为研究背景,以智能性、实用性的大豆玉米联合收割系统为研究对象,瞄准大田环境信息感知、自主探测、自适应控制和多源异构信息融合带来的挑战性难题,深度融合视觉、力觉等感知信息,同时关注生物体的尺度伸缩、空间集聚、动态调整等运动可重构性,构建更加符合生物感知与运动特性的大豆玉米联合收割机器人软硬件系统,突破制约农业机器人智能化水平的核心瓶颈技术问题(图6)。
|
|
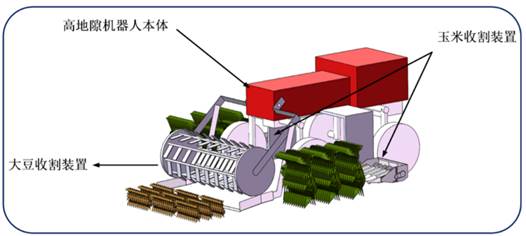
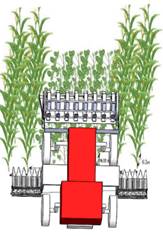
图6大豆玉米带状复合种植模式下的自动收割系统
8.水面救援机器人关键技术研究与应用示范(企业横向项目)
本项目围绕河流、湖泊、大型水库等水面救援任务需求,首先,通过预先建立各种水域的救援场景模型数据库作为机器人路径规划的参考地图,根据多源信息融合的跨模态水上目标检测方法对目标区域内人体生命特征、动作行为及人员数量、位置进行检测与识别,并将这些信息上传至机器人控制平台内作为救援任务下达参考。其次,为使水面救援机器人能在水面进行高效、稳定的移动,采用基于鲁棒控制理论的平衡自适应方法使其能够克服水流、风浪等因素影响,从而快速、平稳地抵达目标人员附近区域进行救援。最后,机器人在抵达目标区域后,利用自身携带的传感器对救援目标采取一种基于外界环境感知的动态适应救援方法,并根据受困人员具体情况灵活采取抛投救生圈、救生衣或释放救援绳缆及攀附架等救援方式,实现目标水域受困人员的自主化救援全过程(图7)。

图7水面救援机器人一期样机研制通过企业现场验收
(图片/柴豪杰 初审/柴豪杰 复审/徐涛 终审/蔡磊)
邮编:453003 | 电话:0373-3040507
地址:河南科技学院东校区弘德楼 | 版权所有:河南科技学院人工智能学院 | 技术支持:河南科技学院智能机器人团队