智能机器人团队
一、团队简介
智能机器人团队是多学科跨域融合团队,主要从事原创性特种机器人(救援机器人、安防巡视机器人等)、农业机器人(畜禽胴体分割机器人、自主割胶机器人、采摘机器人等)和军用机器人(水陆两栖、水下特种作战等)的研发工作,具体涉及智能机器人的自主感知、自主控制、通信链路重构、自主路径规划、机械设计、系统设计与集成等。主持科技部国家重点研发计划、军委科技委H863计划、中央支持地方高校专项、河南省重大专项、河南省重点研发专项、郑洛新国家创新示范区科技攻关等国家级、省部级重点项目7项,其他省部级、横向项目20余项。自主研发40余款机器人产品。主要包括国内首台(套)核酸检测自助采样设备,构型可变AUV、水陆两栖自主巡视(作战)机器人、立体空间攀爬探测机器人、自主割胶机器人、地下管涵探测机器人等。授权发明专利21项,发表SCI/EI检索论文40余篇。获得河南省科技进步二、三等奖各1项,军队科技进步三等奖2项,空军技术革新奖2项,中国创新创业大赛河南赛区优秀团队奖1项。
二、团队领军和负责人简介
|
团队领军:蔡磊,博士(后),二级教授,博士生导师,河南省智能农业机器人技术工程研究中心主任、国家863计划智能机器人主题产业化基地河南分中心主任、河南科技学院人工智能学院院长。河南省政府特殊津贴专家、河南省高层次人才(C类)、河南省教育厅学术技术带头人、河南省高校青年骨干教师。中国自动化学会机器人专委会委员、中国人工智能学会高级会员、河南省机器人行业协会副会长、河南省新乡市科协副主席。先后主持科技部国家重点研发计划智能机器人重点专项、JW科技委H863计划、中央支持地方高校专项等国家级重大、重点项目4项,河南省委“13710”重大督办专项、河南省重大科技专项、河南省重点研发专项、郑洛新国家创新示范区科技攻关、新乡市重大专项等纵向重大、重点项目6项,其他各类省部级以上科研项目20余项,近五年科研经费累计超3000万元。自主研发原创性智能机器人产品40台套,授权发明专利23件,发表SCI/EI检索论文46篇,出版学术专著3部;主持获得河南省科技进步奖二等奖和三等奖各1项,军队科技进步奖2项,空军技术革新奖2项;以技术成果折算股份的成果转化方式成立高新技术公司1家。 |
|
团队负责人:孔德川,副教授,硕士生导师,主要研究方向智能装备研发、智能机器人感知与控制、智慧农业、无线传感器网络。发表论文10余篇,其中EI/SCI检索4篇、中文核心4篇。授权发明专利3项,实用新型专利6项;主持/参与国家重点研发计划、河南省科技攻关、河南省高校重点研发计划、新乡市重点科技计划等纵向科研项目多项;获河南省科技进步三等奖2项,河南省教育厅科技成果一等奖1项,二等奖2项。 |
|
团队负责人:柴豪杰,博士,副教授(内聘),硕士生导师,主要从事机器视觉、智能控制方面研究。人工智能学院科研秘书,中国人工智能学会会员。主持河南省科技攻关项目1项,河南省高等学校重点科研项目1项,参与省部级重大项目5项;获得河南省科技进步二等奖1项(第4完成人)、河南省科技进步三等奖1项(第5完成人),全国人工智能应用场景创新挑战赛全国总决赛二等奖1项,第十八届全国大学生智能汽车竞赛全国总决赛三等奖1项。在国内外重要学术刊物上发表论文12篇,申请/授权国家专利12项。 |
|
团队负责人:郑建锋,博士,副教授(内聘),硕士生导师,主要从事智能农业装备、设施环境优化控制方面研究。河南省智能农业机器人技术工程研究中心秘书,中国农业工程学会会员。主持校自然科学基础研究计划项目1项,参与国家、山东省重点研发计划项目2项;带队获得第一届多多农研科技大赛AI组一等奖1项和第三届多多农研科技大赛二等奖1项。在国内外重要学术刊物上发表SCI/EI论文4篇,授权发明专利4项。 |
|
团队负责人:张芳冰,博士,教授(内聘),硕士生导师,主要从事视觉导航与环境感知方面研究。曾作为主要人员参与国家自然科学基金面上项目、国内无人机研究所“三维重建”项目、以及无人机公司“视觉导航定位”项目的相关研究。在国内外重要学术刊物上参与发表论文数十篇,涵盖IEEE TMM、IEEE TGRS、Remote Sengsing等权威刊物,并申请/授权多项国家发明专利。 |





三、团队科技创新亮点
1.人机交互咽拭子自助采样关键技术及应用(河南省科技进步二等奖)
针对咽拭子采样“他采差异、机采伤害、自采困难”等难题,项目组以“有效、经济、安全、便捷”为目标,以“位置识别-深度预测-动态配准”为研究思路,依托多项国家自然科学基金研发了人机交互咽拭子采样系统,特别是在河南省委“13710”重大督办专项的直接推动下,历经近十年协同攻关,首创了人机交互的咽拭子自助采样模式,突破了咽拭子采样位置精准识别、采样目标动态追踪与深度配准等关键技术,取得了系列创新性成果,填补了二维成像状态下咽拭子与采样位置深度配准的空白。在新冠疫情防控最艰难时期,为及时发现疫情、及时控制疫情做出了了巨大贡献(图1)。
|
|
第一代咽拭子辅助采样机器人 |
第二代咽拭子辅助采样机器人 |
|
|
第三代咽拭子辅助采样机器人 |
第四代咽拭子辅助采样机器人 |




图1 国内首台(套)核酸检测自助采样设备(已经产业化)
2.畜禽类肉品高效精准自主分割机器人技术(国家重点研发计划智能机器人重点专项)
团队瞄准畜禽肉品分割“效率低、损耗多、易污染、无溯源”等行业共性难题,聚焦畜禽类肉品自主分割需求,系统化研制出由10余台套专用机器人及关键装备构成的畜禽类肉品机器人自主分割作业系统。突破了畜禽胴体精准感知、自主切块、精准剔骨等关键核心技术;研制了畜禽胴体三维感知系统、自主切块机器人工作站、自主剔骨机器人工作站等自主作业系统,制定了畜禽类肉品机器人自主分割作业体系行业标准,依并托河南众品、江苏苏食完成四条生产线应用验证(图2-3)。

图2 畜禽类胴体自主切块机器人工作站
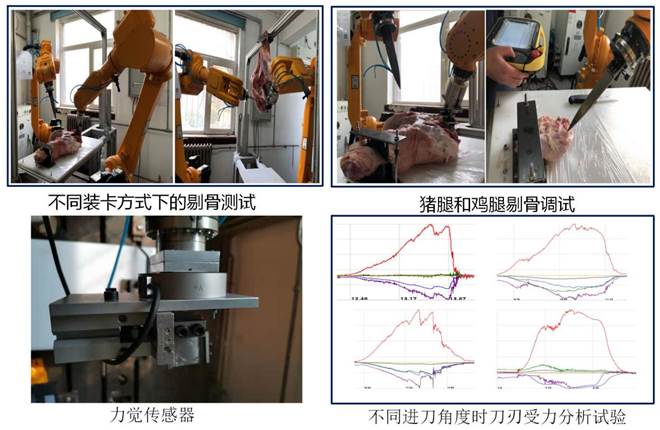
图3 畜禽类胴体快速自主剔骨机器人工作站
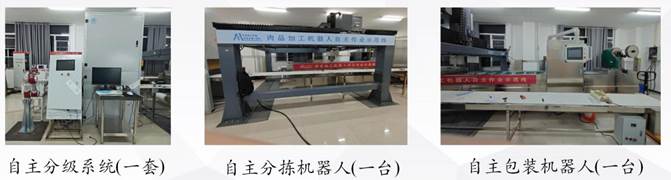
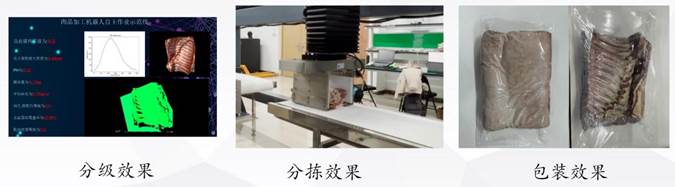
3.肉品智能化加工关键技术与装备研发及应用(河南省重大科技专项)
团队围绕肉品加工分级、分拣、包装、冷链运输等方面面临的共性问题、痛点难点,重点突破了冷却分割肉自主化分级、分拣和包装环节关键技术,开发了冷却分割肉自主分级、分拣与包装机器人系统,解决了我国冷却分割肉自主分级与包装方面长期存在的“效率低、易污染、无溯源”等行业共性难题(图4)。
|
|
图4 新产品研发-研制自主分级系统、自主分拣机器人和自主包装机器人各 1 台(套) |
4.水下坝体智能巡检机器人关键技术研究及应用(河南省重点研发专项)
团队旨在围绕我国水下坝体的安全监测与健康诊断的重大需求,以水下坝体缺陷检测需求为研究背景,以智能化、高效性的水下坝体智能巡检机器人为研究对象,瞄准水库坝体水下部分机器人水下作业结构、稳定控制、通信定位和智能感知等方面的带来的挑战性难题,开展水下坝体智能巡检机器人关键技术研究及应用,满足社会和市场发展需求(图5)。

图5项目总体技术路线
四、团队联系方式
(图片/柴豪杰 初审/柴豪杰 复审/徐涛 终审/蔡磊)
下一条:人工智能交叉应用团队
【关闭】
邮编:453003 | 电话:0373-3040507
地址:河南科技学院东校区弘德楼 | 版权所有:河南科技学院人工智能学院 | 技术支持:河南科技学院智能机器人团队